|
|
You are here: Foswiki>Frontend Web>ProjectCoord>UnilacUpgradeDevaccFESA (30 Jul 2024, AlexanderSchwinn)Edit Attach
Project Scope:
- Port of devacc classes DS, DGX, PPOS, CEHV to FESA (acc9/yocto) (completed)
- Testing of ported FESA classes using real hardware (completed)
- Rollout and testing for all related devices is not included in the project
- DS (link to repo) - milestone 1.0 - Testing finished successfully
- 223 or more DS Devices (SDI)
- Status Testing
- Contact Person HW: Robert Boywitt ?
- Contact Person Application: Anneke Walter and Benjamin Peter
- DGX (link to repo) - milestone 1.0 - Testing finished successfully
- 139 or more DGX Devices (SDI)
- Status Testing
- Contact Person Robert Boywitt (expert), Michael Witthaus (maybe), Reiner Haseitl (if nobody else is there)
- Contact Person Application: Martin Stein und Jonas Pforr (devacc Java GUI)
- Testing with Pilot beam is out of scope forthis project. (Best should be done in December 2024)
- PPOS (link to repo) - milestone 1.0 - Testing finished successfully
- 8 PPOS Devices
- Status Testing
- Contact Person HW: Ulrich Popp
- Contact Person Application: Anneke Walter and Benjamin Peter
- CEHV (link to repo) - milestone 1.0 - Testing finished successfully
- 2 CEHV Devices
- Status Testing
- Contact Person HW: Jon Roßbach
- Contact Person Application: ?
- Don't upgrade any Unilac devacc classes to Fesa for 2024 (Because Pulszentrale + LSA Setup are frozen) * Plan is to swap only SIS and ESR devices for all classes
- Are the devacc classes DSKM, DSM DME as well in scope of the port?
- No, so far only DS itself (According to Klaus Höppner)
- Which Hardware is involved here:
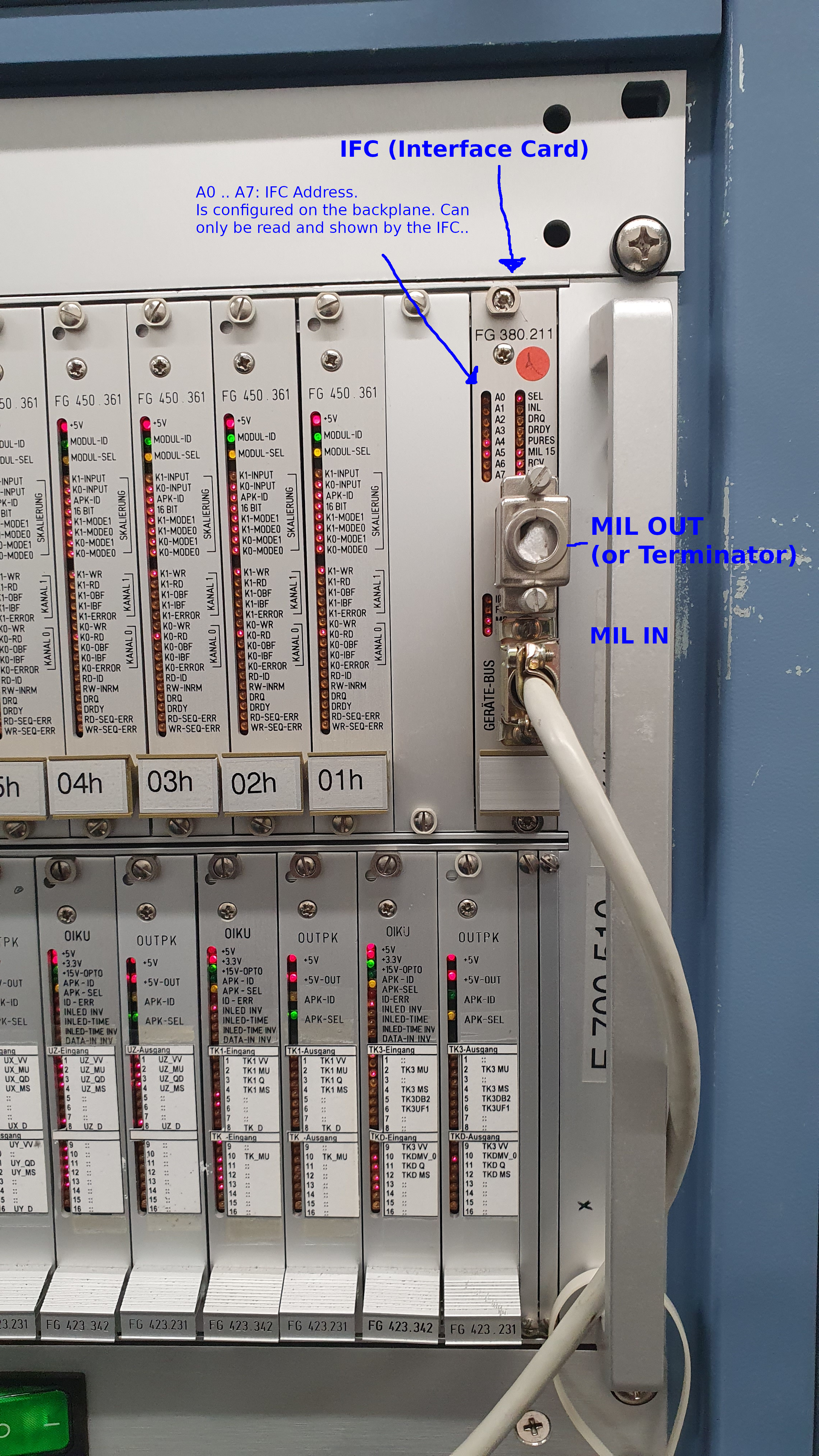
- Each SCU has 1...n SIO's. Each SIO controls 1...n IFC's (Interface Cards) via MIL Bus (See attached image)
- Meetings:
- Next meeting will be on 16.01.24 ... then we will see how to proceed
- Testing:
- Done by Cosylab person + GSI hardware contact person
- Get/Set of all properties should be tested in all possible device-states
- Reaction on timing events, if any (can be simulated on FEC, no need to run a full schedule)
- Interlock behavior, if there are any interlocks/interrupts
- GSI hardware contact person should give his "ok" to confirm that things work as expected
- Are there any meeting notes ?
- From now on, relevant stuff for this project is tracked directly on this Wiki page and the linked milestones / issues
- Old notes can be found here:
- https://pad.acc.gsi.de/QKNtEEIqTbK50EFfz4XL1w?both#
- Notes Cosylab.eml: Email with some notes related to past cosylab coordination meetings
- Devacc supports SDI and SDN MIL-Bus communication for DS and DGX devices. What about the Fesa class ?
- The Fesa classes does not need to support the SDN types (ancient 8085 microprocessor, SDuP variant, aka "SDMicrocomputer"), since it is anyhow planned to replace them by SDI hardware.
- SDuP --> replacement might take beam-diagnostics some years (According to RoFi(Roland Fischer)), since they are short on manpower
- Should DS (and maybe PPOS) fulfill any stepper-motor API standards ?
- Until today (10.01.24) no such standard has been created, so there is nothing which could be fulfilled
- Once such a standard is in place, the Fesa properties API of DS and PPOS can be modified accordingly
- Why there are motor, slit and collimator-devices in DSStepperMotor ?
- Each Slit corresponds to 2 motors, each collimator corresponds to 2 slits
- Actually for slits and collimator only the Status property can be used
- It is not clear if slit/collimator devices were used at all in deviceaccess, since they were calling directly motor-functions, which does not make much sense
- Who/When client applications will be ported from devacc to Fesa ?
- Port of client applications will not be part of this project, since rollout will happen only afterward (timeframe not yet clear)
- DGX: What is a "Kopfverstärker"
- SIS SDI Devices seem to be the so called "Kopfverstärker Variante"


| I | Attachment | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|
| |
20231207_111157_modified.jpg | manage | 2 MB | 19 Dec 2023 - 14:01 | AlexanderSchwinn | IFC (Interface Card) |
| |
DGX_Multiplexer_und_Verstärker_kommentiert.jpg | manage | 5 MB | 20 Feb 2024 - 10:55 | AlexanderSchwinn | DGX Multiplexer |
| |
DGX_Steuerelektronik_kommentiert.jpg | manage | 5 MB | 20 Feb 2024 - 09:08 | AlexanderSchwinn | DGX Steuerelektronik mit Kommentaren |
| |
DS_Schrittmotorboxen_kommentiert.jpg | manage | 5 MB | 20 Feb 2024 - 10:54 | AlexanderSchwinn | DS Schrittmotorboxen mit Kommentaren |
| |
Notes Cosylab.eml | manage | 21 K | 20 Dec 2023 - 13:04 | AlexanderSchwinn | Email with some notes related to past cosylab coordination meetings |
| |
Profilegrid_Interface_with_DP_RAM.pdf | manage | 423 K | 04 Jun 2024 - 11:18 | AlexanderSchwinn | DGX Hardware Interface |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Edit | Attach | Print version | History: r28 < r27 < r26 < r25 | Backlinks | View wiki text | Edit wiki text | More topic actions
Topic revision: r28 - 30 Jul 2024, AlexanderSchwinn
Ideas, requests, problems regarding Foswiki? Send feedback